| |
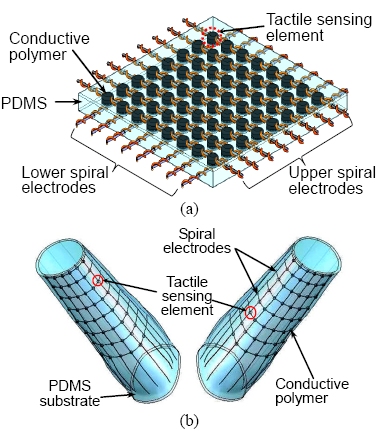
圖1. (a)觸覺感測陣列示意圖. (b) 手臂形狀之感測陣示意圖.
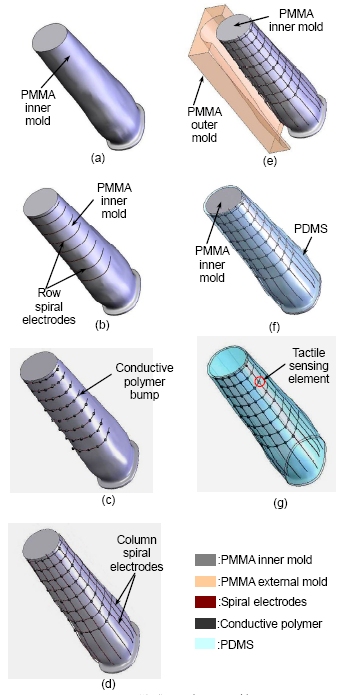
圖2. 大面積人形化感測陣列製作流程圖
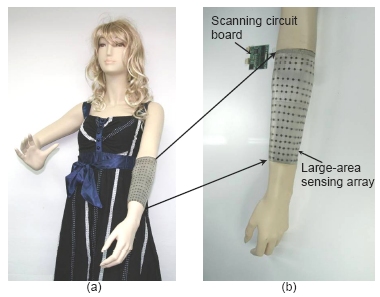
圖3. (a)和(b)為大面積16×16 感測陣列裝置於模特兒手臂之實體圖及局部放大圖
相關發表:
1. C.-M. Tsao, M.-Y. Cheng and Y.-J. Yang, “Highly Twistable Tactile Sensing Array for Humanoid Robot Applications,” Proceedings of the 26th National Conference on Mechanical Engineering of CSME, 2009. (Oral presentation)
2. Ming-Yuan Cheng, Chan-Mo Tsao and Yao-Joe Yang, "An Anthropomorphic Robotic Skin Using Highly Twistable Tactile Sensing Array," The 5th IEEE Conference on Industrial Electronics and Applications, 2010. |
|