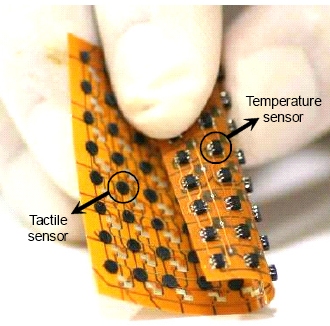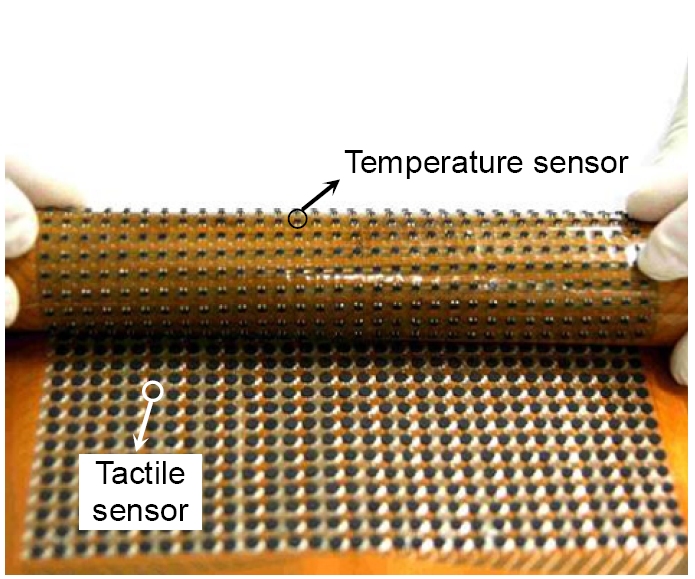
圖3. 32x32 溫度與壓力感測陣列
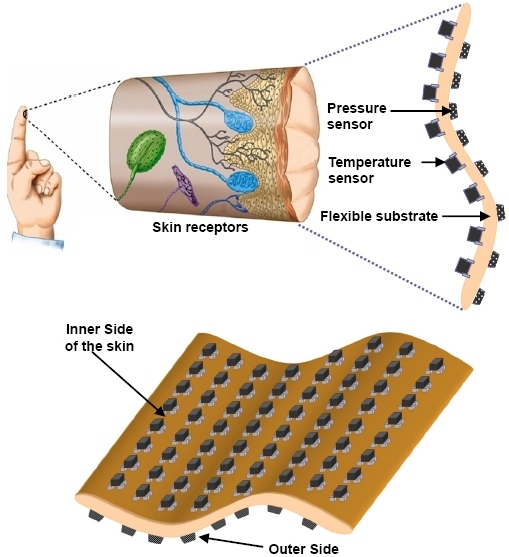
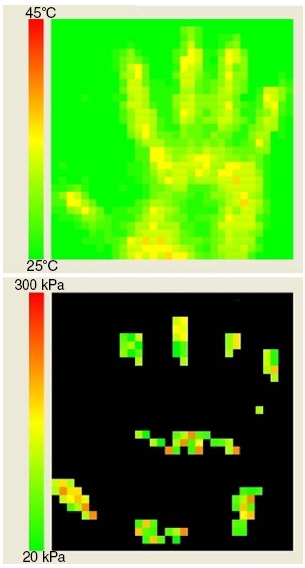
圖4. 由32x32溫度/壓力感測陣列所量取之人類右手溫度/壓力分佈
相關發表:
1. Y.-J. Yang, M.-Y. Cheng, W.-Y. Chang, L.-C. Tsao, S.-A. Yang, W.-P. Shih, F.-Y. Chang, S.-H. Chang, and K.-C. Fan, "An integrated flexible temperature and tactile sensing array using PI-copper films," Sensors and Actuators A-Physical, vol. 143, pp. 143-153, 2008. (SCI/EI)
2. Y.-J. Yang, M.-Y. Cheng, S.-C. Shih, X.-H. Huang, C.-M. Tsao, F.-Y. Chang, and K.-C. Fan, “A 32×32 temperature and tactile sensing array using PI-copper films”, International Journal of Advanced Manufacturing Technology, 2009. (SCI/EI)
3. 鄭茗元, 范光照, 楊燿州, 施文彬, 張復瑜, “包含壓力與溫度感測器之人工皮膚,” 中華民國發明第I309195, 2009.