|
 |
|
| |
可高度延展之感測器陣列
作者: 鄭茗元,曹展謀,賴昱澤,馬政文
簡介:
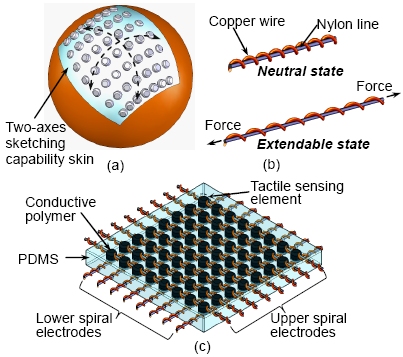
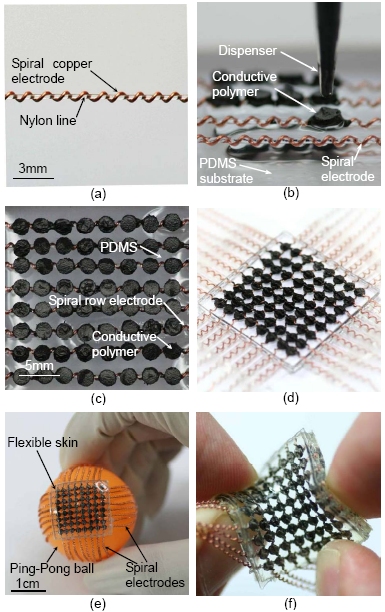
本研究採用彈性電路的概念,發展出可高度伸展之觸覺感測器陣列,將做為於仿生機器人之人工皮膚。由於傳統式可撓性感測陣列於高度變形與拉扯的情況下,導線或電極容易破裂損壞,因此本研究提出一種具有高度可拉扯性與撓曲性的螺旋電極,將可提升導線與電極在撓性基材內的可靠度。所提出的觸覺感測陣列以聚二甲基矽氧烷 (PDMS) 做為可撓性基材與導電橡膠材質。並以導電橡膠做為感測機制,利用自動點膠製程,將導電橡膠個別的點膠於感測電極上做為觸覺感測單元。所製做出的感測器陣列能承受高於70度扭轉變形,而不會導致裝置在結構上或功能性的損害。 |
|
| |
圖1. (a) 具雙軸延展性之人工皮膚. (b)具伸展性之螺旋電極. (c)高度延展性人工皮膚示意圖.
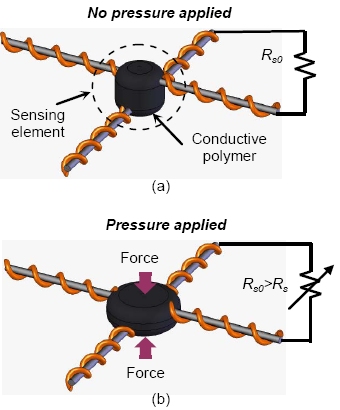 圖2. 導電橡膠感測原理
圖2. 導電橡膠感測原理
圖 3. (a)螺旋電極. (b)自動點膠過程. (c)導電橡膠點膠於螺旋電極. (d)(e)(f)高度延展性觸覺感測陣列.
相關發表:
1. M.-Y. Cheng, C.-M. Tsao, Y.-Z. Lai and Y.-J. Yang, “The development of a highly twistable tactile sensing array with stretchable helical electrodes,” Sensors and Actuators A: Physical, (Minor optional revisions, Article ID: SNA-S-09-00368). (SCI/EI)
2. M.-Y. Cheng, C.-M. Tsao and Y.-J. Yang, “A novel highly-twistable tactile sensing array using extendable spiral electrodes,” 22nd IEEE International Conference on Micro Electro Mechanical Systems (MEMS 2009), pp.92-95, 2009. (Oral presentation)
3. C.-M. Tsao, M.-Y. Cheng and Y.-J. Yang, “Highly Twistable Tactile Sensing Array for Humanoid Robot Applications,” Proceedings of the 26th National Conference on Mechanical Engineering of CSME, 2009. (Oral presentation)
|
|
|
|
|
|
|
|
|
|
|
|