Ming-Yuan Cheng, Chan-Mo Tsao, Yu-Tze Lai, and Cheng-Wen Ma
The development of an anthropomorphic robot skin integrated with a large-area 16×16 highly-stretchable tactile sensing arrays is presented in this paper.Conventionally, the electrodes of flexible sensing array are vulnerable under highly-deforming and stretching.To address this problem, highly-stretchable spiral electrodes were proposed and developed.The reliability of electrodes or interconnects for flexible sensing arrays by this approach.In addition, a novel method, which can be used to fabricate an anthropomorphic skin, is proposed.Polydimethylsiloxsane (PDMS) is employed as the skin structure and conductive polymer is used as tactile sensing material.The corresponding scanning circuit is also designed and implemented.The electrical characteristic of conductive polymer is measured, and the tactile images induced by external applied pressure are successfully captured.
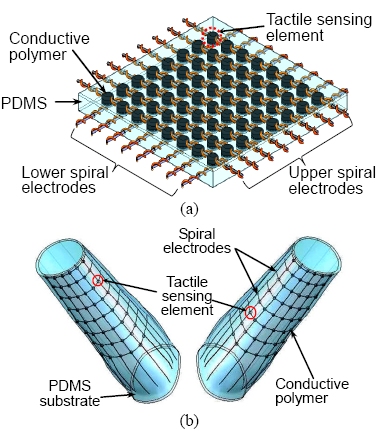
Figure 1. (a) The schematic of the proposed tactile sensing array. (b) The schematic of the proposed skin with an arm shape.
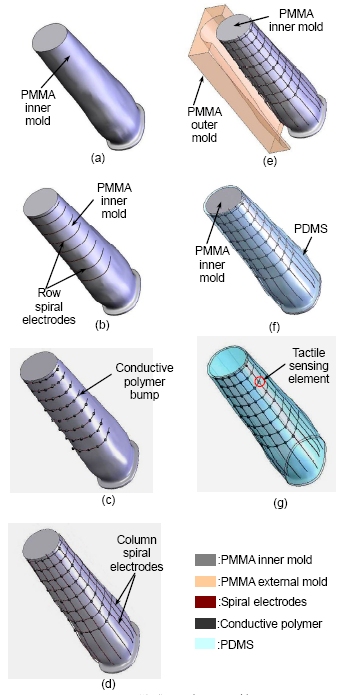
Figure 2. Fabrication process of the large-area tactile sensing array.
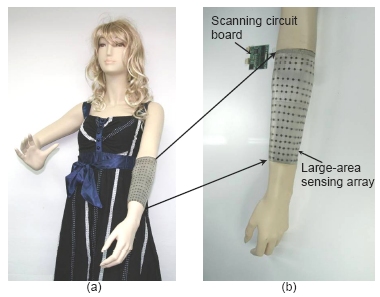
Figure 3. (a) The picture of the fabricated skin which is embedded on a model’s arm. (b) The magnified view of the fabricated skin.
Publications:
1.C.-M. Tsao, M.-Y. Cheng and Y.-J. Yang, “Highly Twistable Tactile Sensing Array for Humanoid Robot Applications,” Proceedings of the 26th National Conference on Mechanical Engineering of CSME, 2009. (Oral presentation)
2. Ming-Yuan Cheng, Chan-Mo Tsao and Yao-Joe Yang, "An Anthropomorphic Robotic Skin Using Highly Twistable Tactile Sensing Array," The 5th IEEE Conference on Industrial Electronics and Applications, 2010.
Address :
Department of Mechanical Engineering,
National Taiwan University,
No. 1, Roosevelt Rd., Sec. 4, Taipei, Taiwan (R.O.C)